3. Короткий вступ до дистанційного зондування¶
3.1. Основні поняття¶
В цьому розділі наведено основні поняття щодо ГІС та дистанційного зондування. Інші корисні джерела дивіться у Free and valuable resources about remote sensing and GIS.
3.1.1. Поняття ГІС¶
Існує декілька визначень ГІС (Географічних інформаційних систем), які не є просто програмним забезпеченням. В загальному розумінні ГІС це системи, які забезпечують використання географічної інформації (даних з просторовими координатами). У вужчому розумінні ГІС забезпечують перегляд, запити, розрахунки та аналіз просторових даних, які здебільшого розрізняються як векторна та растрова структури даних. Вектор складається з об’єктів, які можуть бути точками, лініями або полігонами та кожний об’єкт може мати одне або декілька атрибутивних значень; растр це регулярна сітка (або знімок), кожна комірка якої має атрибутивне значення (Fisher and Unwin, 2005). Багато ГІС-застосунків використовують растрові знімки, отримані шляхом дистанційного зондування.
3.1.2. Поняття дистанційного зондування¶
В загальному розумінні дистанційне зондування це “наука та технологія за допомогою яких характеристики об’єктів інтересу можуть ідентифікуватись, вимірюватись та аналізуватись за відсутності безпосереднього контакту” (JARS, 1993).
У вужчому розумінні дистанційне зондування це вимірювання енергії, що випромінюється від земної поверхні. Якщо джерелом енергії, що вимірються, є Сонце, то це пасивне дистанційне зондування і результатом такого вимиріювання може бути цифровий знімок (Richards and Jia, 2006). Якщо енергія, що вимірюється, випромінюється не Сонцем, а платформою сенсора, такою як радарні сесори, що працюють у мікрохвильовому діапазоні, то це активне дистанційне зондування (Richards and Jia, 2006).
Електромагнітний спектр це “система, що класифікує за довжиною хвилі всю енергію (від короткохвильової космічної до довгохвильової радіо), що гармонічно рухається з постійною швидкістю світла” (NASA, 2013). Пасивні сенсори вимірюють енергію з оптичних областей електромагнітного спектра: видимої, ближньої інфрачервоної (ІЧ), короткохвильової ІЧ та теплової ІЧ (див. Рисунок Електромагнітний спектр).
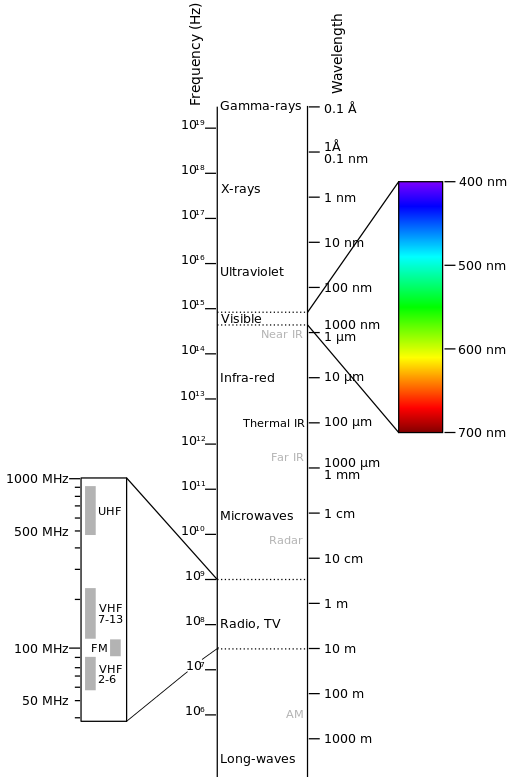
Електромагнітний спектр
за Victor Blacus (SVG версія File:Electromagnetic-Spectrum.png)
[CC-BY-SA-3.0 (http://creativecommons.org/licenses/by-sa/3.0)]
за посередництвом Wikimedia Commons
http://commons.wikimedia.org/wiki/File%3AElectromagnetic-Spectrum.svg
Взаємодія між сонячною енергією та матеріалами залежить від довжини хвилі; сонячна енергія проходить від Сонця до Землі, а потім до сенсора. Вздовж цього шляха сонячна енергія (NASA, 2013):
Проникла - енергія проходить через з зміною у швидкості відповідно до індексу заломлювання для двох середовищ, про які йде мова.
Поглинена - енергія передається об’єкту через електронні або молекулярні реакції.
Відбита - енергія повертається незміненою з кутом відбивання, що дорівнює куту надходження. Відбивальна здатність це відношення відбитої енергії до тієї, що надійшла до тіла. Довжина хвилі відбитої (а не поглиненої) енергії визначає колір об’єкта.
Розсіяна - напрямок поширювання енергії змінюється випадково. Розсіювання Рейлі та Мі - два найбільш важливі типи розсіювання в атмосфері.
Випромінена - в дійсності, енергія спочатку поглинається, а потім випромінюється знову, зазвичай на довших довжинах хвиль. Об’єкт розігрівається.
3.1.3. Сенсори¶
Сенсори можуть знаходитись на борті літака або супутника, вимірюючи електромагнітну радіацію у деяких визначених діапазонах (які зазвичай називаються каналами). В результаті, вимірювання квантуються та перетворюються на цифрове зображення, кожен елемент якого (тобто піксель) має дискретне значення в одиницях цифрових чисел (Digital Number - DN) (NASA, 2013). Результуючі зображення мають різні характеристики (вирізняльні здатності) залежно від сенсора. Виділяють декілька типів вирізняльної здатності:
Просторова вирізняльна здатність, зазвичай відповідає роміру пікселя, “це вирізняльна здатність інструмента, необхідна для виокремлення об’єктів, що залежить від розміру детектора, фокусної відстані та висоти сенсора” (NASA, 2013); просторову родільну здатність також називають геометричною роздільною здатністю або IFOV;
Спектральна вирізняльна здатність це кількість та положення електромагнітних спектрів (що визначаються двома довжинами хвиль) спектральних каналів (NASA, 2013) багатоспектральних сенсорів, кожному каналу відповідає зображення;
Радіометрична вирізняльна здатність, зазвичай вимірюється у бітах (двійкових цифрах), це діапазон можливих значень яскравості, який для знімка відповідає максимальному діапазону DN; наприклад, знімок з вирізняльною здатністю 8 біт має 256 рівнів яскравості (Richards and Jia, 2006);
Для супутникових сенсорів, є також часова вирізняльна здатність, яка відповідає часу, необхідному для повторного перегляду тієї самої ділянки Землі (NASA, 2013).
3.1.4. Енергетична світність та відбивальна здатність¶
Сенсори вимірюють енергетичну світність, яка відповідає яскравості у заданому напрямку до сенсора; також доцільно вирізняти відбивальну здатність як відношення відбитої до загальної енергії.
3.1.5. Спектральна сигнатура¶
Спектральна сигнатура це відбивальна здатність як функція довжини хвилі (див. Рис. Криві спектральної відбивальної здатності для чотирьох різних цілей); кожен матеріал має унікальну сигнатуру, яка завдяки цьому може використовуватись для класифікації матеріалів (NASA, 2013).
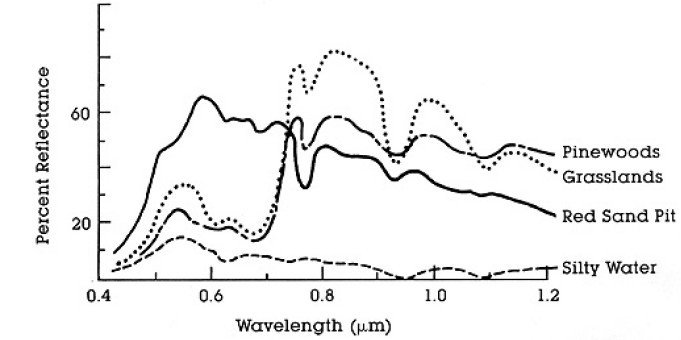
Криві спектральної відбивальної здатності для чотирьох різних цілей
(за NASA, 2013)
3.1.6. Супутник Landsat¶
Landsat це серія багатоспектральних супутників, розроблених NASA (Національним управлінням з аеронавтики і дослідження космічного простору США), з початку 1970-х.
Знімки Landsat широко вживані у дослідженнях довкілля. Вирізняльні здатності сенсорів Landsat 4 та Landsat 5 наведені в таблиці нижче (за http://landsat.usgs.gov/band_designations_landsat_satellites.php); часова вирізняльна здатність Landsat становить 16 днів (NASA, 2013).
Канали Landsat 4 та Landsat 5
Канали Landsat 4, Landsat 5 |
Довжина хвилі [мікрометри] |
Вирізняльна здатність [метри] |
|---|---|---|
Канал 1 - Синій |
0.45 - 0.52 | 30 |
Канал 2 - Зелений |
0.52 - 0.60 | 30 |
Канал 3 - Червоний |
0.63 - 0.69 | 30 |
Канал 4 - Ближній інфрачервоний (NIR) |
0.76 - 0.90 | 30 |
Канал 5 - SWIR |
1.55 - 1.75 | 30 |
Канал 6 - Тепловий інфрачервоний |
10.40 - 12.50 | 120 (передискретизована до 30) |
Канал 7 - SWIR |
2.08 - 2.35 | 30 |
Вирізняльні здатності сенсора Landsat 7 наведено в таблиці нижче (за http://landsat.usgs.gov/band_designations_landsat_satellites.php); часова вирізняльна здатність Landsat становить 16 днів (NASA, 2013).
Канали Landsat 7
| Landsat 7 Bands | Довжина хвилі [мікрометри] |
Вирізняльна здатність [метри] |
|---|---|---|
Канал 1 - Синій |
0.45 - 0.52 | 30 |
Канал 2 - Зелений |
0.52 - 0.60 | 30 |
Канал 3 - Червоний |
0.63 - 0.69 | 30 |
Канал 4 - Ближній інфрачервоний (NIR) |
0.77 - 0.90 | 30 |
Канал 5 - SWIR |
1.57 - 1.75 | 30 |
Канал 6 - Тепловий інфрачервоний |
10.40 - 12.50 | 60 (передискретизована до 30) |
Канал 7 - SWIR |
2.09 - 2.35 | 30 |
Канал 8 - Панхроматичний |
0.52 - 0.90 | 15 |
Вирізняльні здатності сенсора Landsat 8 наведено в таблиці нижче (за http://landsat.usgs.gov/band_designations_landsat_satellites.php); часова вирізняльна здатність Landsat становить 16 днів (NASA, 2013).
Канали Landsat 8
| Landsat 8 Bands | Довжина хвилі [мікрометри] |
Вирізняльна здатність [метри] |
|---|---|---|
Канал 1 - Узбережний аерозоль |
0.43 - 0.45 | 30 |
Канал 2 - Синій |
0.45 - 0.51 | 30 |
Канал 3 - Зелений |
0.53 - 0.59 | 30 |
Канал 4 - Червоний |
0.64 - 0.67 | 30 |
Канал 5 - Ближній інфрачервоний (NIR) |
0.85 - 0.88 | 30 |
Канал 6 - SWIR 1 |
1.57 - 1.65 | 30 |
Канал 7 - SWIR 2 |
2.11 - 2.29 | 30 |
Канал 8 - Панхроматичний |
0.50 - 0.68 | 15 |
Канал 9 - Пір’їсті хмари |
1.36 - 1.38 | 30 |
Канал 10 - Тепловий інфрачервоний (TIRS) 1 |
10.60 - 11.19 | 100 (передискретизована до 30) |
Канал 11 - Тепловий інфрачервоний (TIRS) 2 |
11.50 - 12.51 | 100 (передискретизована до 30) |
Великий архів знімків безкоштовно доступний від Геологічної служби США . Для більш докладної інформації щодо безкоштовного завантаження знімків Landsat читайте .
Знімки ідентифікуються траєкторіями та рядками WRS (Глобальна система місцерозташування для Landsat Worldwide Reference System for Landsat ).
3.1.7. Супутник Sentinel-2¶
Sentinel-2 це багатоспектральний супутник, розроблений Европейським космічним агентством (European Space Agency - ESA) в рамках програми мніторингу земель Copernicus . Sentinel-2 має 13 спектральних каналів з просторовою вирізняльною здатністю 10 м, 20 м та 60 м залежно від каналу, як наведено у таблиці нижче (ESA, 2015).
Канали Sentinel-2
Канали Sentinel-2 |
Цетральна довжина хвилі [мікрометри] |
Вирізняльна здатність [метри] |
|---|---|---|
Канал 1 - Узбережний аерозоль |
0.443 | 60 |
Канал 2 - Синій |
0.490 | 10 |
Канал 3 - Зелений |
0.560 | 10 |
Канал 4 - Червоний |
0.665 | 10 |
Канал 5 - Червоний край рослинності |
0.705 | 20 |
Канал 6 - Червоний край рослинності |
0.740 | 20 |
Канал 7 - Червоний край рослинності |
0.783 | 20 |
Канал 8 - NIR |
0.842 | 10 |
Канал 8А - Червоний край рослинності |
0.865 | 20 |
Канал 9 - Водяна пара |
0.945 | 60 |
Канал 10 - SWIR - Пір’їсті хмари |
1.375 | 60 |
Канал 11 - SWIR |
1.610 | 20 |
Канал 12 - SWIR |
2.190 | 20 |
Знміки Sentinel-2 безкоштовно доступні з веб-сайту ESA https://scihub.esa.int/dhus/ .
3.1.8. Супутник ASTER¶
Супутник ASTER (Advanced Spaceborne Thermal Emission and Reflection Radiometer - Покращений космічний радіометр теплового випромінювання та відбивання) був запущений у 1999 за співробітництва між Міністерством міжнародної торігівлі та індустрії Японії (Japanese Ministry of International Trade and Industry - MITI) та NASA. ASTER має 14 каналів вирізняльна здатність яких змінюється відповідно до довжини хвилі: 15 м у видимому та ближньому інфрачервоному, 30 м у короткохвильовому інфрачервоному та 90 м у тепловому інфрачервоному (USGS, 2015). Канали ASTER охарактеризовано в таблиці нижче (через вихід з ладу сенсора дані SWIR, отримані після 1 квітня 2008 недоступні ). Додатковий канал 3B (ближній інфрачервоний оберненого назад огляду) забезпечує стерео покриття.
Канали ASTER
Канали ASTER |
Довжина хвилі [мікрометри] |
Вирізняльна здатність [метри] |
|---|---|---|
Канал 1 - Зелений |
0.52 - 0.60 | 15 |
Канал 2 - Червоний |
0.63 - 0.69 | 15 |
Канал 3N - Ближній інфрачервоний (NIR) |
0.78 - 0.86 | 15 |
Канал 4 - SWIR 1 |
1.60 - 1.70 | 30 |
Канал 5 - SWIR 2 |
2.145 - 2.185 | 30 |
Канал 6 - SWIR 3 |
2.185 - 2.225 | 30 |
Канал 7 - SWIR 4 |
2.235 - 2.285 | 30 |
Канал 8 - SWIR 5 |
2.295 - 2.365 | 30 |
Канал 9 - SWIR 6 |
2.360 - 2.430 | 30 |
Канал 10 - TIR 1 |
8.125 - 8.475 | 90 |
Канал 11 - TIR 2 |
8.475 - 8.825 | 90 |
Канал 12 - TIR 3 |
8.925 - 9.275 | 90 |
Канал 13 - TIR 4 |
10.25 - 10.95 | 90 |
Канал 14 - TIR 5 |
10.95 - 11.65 | 90 |
3.1.9. Продукти MODIS¶
MODIS (англ. Moderate Resolution Imaging Spectroradiometer - спектрорадіометр помірної вирізняльної здатності) це інструмент, що працює на супутниках Terra та Aqua, запущених NASA 1999 та 2002 року відповідно. Його часова вирізняльна здатність дозволяє оглядати всю поверхню Землі щоденно або через день при ширині смуги зйомки 2,330. Його сенсори фіксують інформацію за 36 спектральними каналами з трьома просторовими вирізняльними здатностями: 250 м, 500 м та 1,000 м (див. https://lpdaac.usgs.gov/dataset_discovery/modis).
Доступні декілька продуктів, таких як відбивальність поверхні та вегетаційні індекси. В цьому посібнику ми розглядаємо канали відбивальності поверхні доступні з просторовою вирізняльною здатністю 250 м та 500 м (Vermote, Roger, & Ray, 2015).
Канали MODIS
Канали MODIS |
Довжина хвилі [мікрометри] |
Вирізняльна здатність [метри] |
|---|---|---|
Канал 1 - Червоний |
0.62 - 0.67 | 250 - 500 |
Канал 2 - Ближній інфрачервоний (NIR) |
0.841 - 0.876 | 250 - 500 |
Канал 3 - Синій |
0.459 - 0.479 | 500 |
Канал 4 - Зелений |
0.545 - 0.565 | 500 |
Канал 5 - SWIR 1 |
1.230 - 1.250 | 500 |
Канал 6 - SWIR 2 |
1.628 - 1.652 | 500 |
Канал 7 - SWIR 3 |
2.105 - 2.155 | 500 |
Наступні продукти (Версія 6, див. https://lpdaac.usgs.gov/dataset_discovery/modis/modis_products_table) доступні для завантаження (Vermote, Roger, & Ray, 2015):
MOD09GQ: щоденна відбивальність з просторовою вирізняльною здатністю 250 м за Terra MODIS;
MYD09GQ: щоденна відбивальність з просторовою вирізняльною здатністю 250 м за Aqua MODIS;
MOD09GA: щоденна відбивальність з просторовою вирізняльною здатністю 500 м за Terra MODIS;
MYD09GA: щоденна відбивальність з просторовою вирізняльною здатністю 500 м за Aqua MODIS;
MOD09Q1: відбивальність з просторовою вирізняльною здатністю 250 м, як композит MOD09GQ (кожний піксель містить найкраще можливе спостереження за 8-денний період);
MYD09Q1: відбивальність з просторовою вирізняльною здатністю 250 м, як композит MYD09GQ (кожний піксель містить найкраще можливе спостереження за 8-денний період);
MOD09A1: відбивальність з просторовою вирізняльною здатністю 250 м, як композит MOD09GA (кожний піксель містить найкраще можливе спостереження за 8-денний період);
MYD09A1: відбивальність з просторовою вирізняльною здатністю 250 м, як композит MYD09GA (кожний піксель містить найкраще можливе спостереження за 8-денний період);
3.1.10. Кольоровий композит¶
Зазвичай створюється комбінація трьох індивідуальних монохромних зображень, в якій кожному призначається певний колір; така комбінація називається кольоровий композит та корисна для візуальної інтерпретації (NASA, 2013). Кольрові композити можуть бути описані наступним виразом:
“R G B = Br Bg Bb”
де:
R відповідає Червоному;
G відповідає Зеленому;
B відповідає Синьому;
Br це номер каналу, що асоціюється з червоним кольором;
Bg це номер каналу, що асоціюється з зеленим кольором;
Bb це номер каналу, що асоціюється з синім кольором.
Наступний рисунок Кольоровий композит знімка Landsat 8 демонструє кольоровий композит “R G B = 4 3 2” знімка Landsat 8 (для Landsat 7 аналогічний кольровий композит це R G B = 3 2 1; для Sentinel-2 це R G B = 4 3 2) та кольоровий композит “R G B = 5 4 3” (для Landsat 7 аналогічний кольоровий композит це R G B = 4 3 2; для Sentinel-2 це R G B = 8 4 3). Композит “R G B = 5 4 3” корисний для інтерпретації зображень тому що пікселі з рослинністю виглядають червоними (здорова рослинність відбиває значну частину надхідного світла в ближній іфрачервоній зоні, що проявляється у вищих значеннях відбивальності для каналу 5, а відтак і вищих значеннях для пов’язаного червоного кольору).
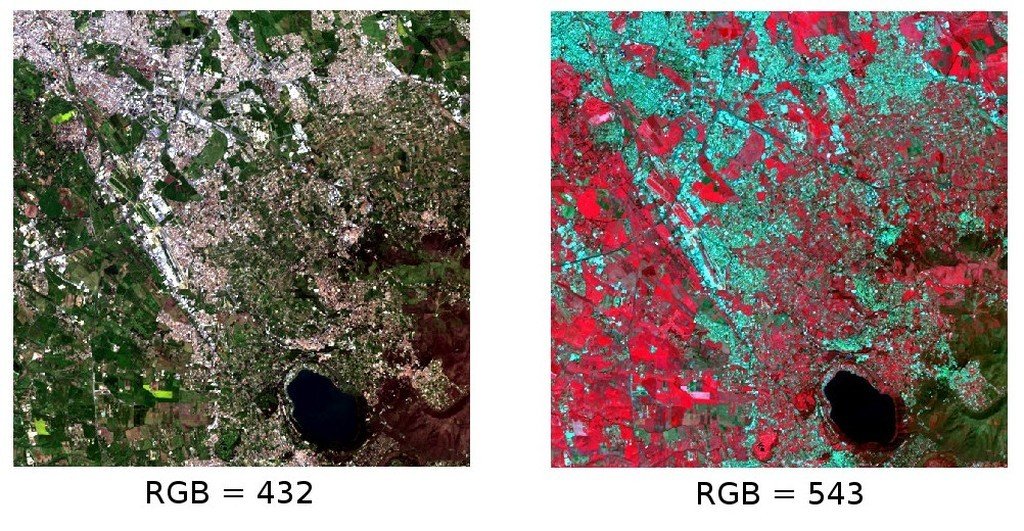
Кольоровий композит знімка Landsat 8
Дані доступні з Геологічної служби США
3.1.11. Аналіз головних компонент¶
Аналіз головних компонент (Principal Component Analysis - PCA) це метод зменшення вимірності змінних (каналів) до головних компонент (JARS, 1993).
Трансформація головних компонент надає новий набір каналів (головних компонент), які мають наступні характеристики: головні компоненти не корелюють; кожна наступна компонента має дисперсію меншу, ніж попередня компонента. Відтак, це ефективний метод виокремлення інформації та ущільнювання даних (Ready and Wintz, 1973).
У випадку знімка з N спектральними каналами головні компоненти отримуються розрахунком матриці (Ready and Wintz, 1973; Richards and Jia, 2006):
де:
\(Y\) = вектор головних компонент
\(D\) = матриця власних векторів матриці коваріації \(C_x\) в просторі X
\(t\) позначає транспонування вектора
А \(X\) розраховується як:
\(P\) = вектор спектральних значень, що відповідають кожному пікселю
\(M\) = вектор середніх значень, що відповідають кожному каналу
Відтак, середнє \(X\), що відповідає кожному каналу становить 0. \(D\) формується власними векторами (матриці коваріації \(C_x\)), впорядкованими як власні числа від максимуму до мініму, для отримання максимальної дисперсії у першій компоненті. Таким чином, головні компоненти не корелюють та кожна наступна компонента має дисперсію меншу, ніж попередня (Ready and Wintz, 1973).
Зазвичай перші дві компоненти містять понад 90% дисперсії. Наприклад, перша головна компонента може бути відображена у Кольоровий композит для підкреслення класів Земельний покрив або використана в якості входових даних для Контрольована класифікація.
3.1.12. Панхроматичне об’єднання¶
Панхроматичне об’єднання або пан-шарпенинг це поєднання спектральної інформації багатоспектральних каналів (MS), які мають нижчу вирізняльну здатність (для каналів Landsat просторова вирізняльна здатність становить 30 м), з просторовою вирізняльною здатністю панхроматичного каналу (PAN), яка для Landsat 7 та 8 становить 15 м. Результатом є багатоспектральне зображення з просторовою вирізняльною здатністю панхроматичного каналу (тобто 15 м). В SCP застосовується перетворення Бровея, де перетворені значення кожного багатоспектрального каналу розраховуються як (Johnson, Tateishi and Hoan, 2012):
де \(I\) це Інтенсивність, яка є функцією багатоспектральних каналів.
Відповідно до декількох тестів, проведених з застосуванням SCP, для I визначено наступні вагові коефіцієнти. Для Landsat 8, Інтенсивність розраховується як:
Для Landsat 7, Інтенсивність розраховується як:

Приклад знімка Landsat 8, який був підданим панхроматичному об’єднанню. Ліворуч первинні багатоспектральні канали (30 м); праворуч панхроматично об’єднані (15 м)
Дані доступні з Геологічної служби США
3.1.13. Спектральні індекси¶
Спектральні індекси це математичні дії між спектральними каналами спрямовані на отримання інформації про рослинний покрив (JARS, 1993). Один з найбільш популярних індексів це вегетаційний індекс нормалізованої різниці (англ. Normalized Difference Vegetation Index - NDVI), що визначається як (JARS, 1993):
Значення NDVI варіюють від -1 до 1. Густа та здорова рослинність демонструє вищі значення, а ділянки без рослинного покриву характеризуються низькими значеннями NDVI.
Інший індекс це підсилений вегетаційний індекс (англ. Enhanced Vegetation Index - EVI), який намагається враховувати атмосферні ефекти, такі як енергетична світність, відбита від атмосфери, розраховуючи різницю між синім та червоним каналами (Didan,et al., 2015). EVI визначається як:
де: \(G\) масштабний коефіцієнт, \(C_1\) та \(C_2\) коефіцієнти атмосферних ефектів та \(L\) фактор для урахування диференційного NIR та червоного випромінного передавання через рослинний полог. Типові значення коефіцієнтів становлять: \(G = 2.5\), \(L = 1\), \(C_1 = 6\), \(C_2 = 7.5\) (Didan,et al., 2015).
3.2. Поняття контрольованої класифікації¶
В цьому розділі наведено основні поняття щодо контрольованої класифікації
3.2.1. Земельний покрив¶
Земельний покрив це матеріал на земній поверхні такий як ґрунт, рослинність, вода, асфальт тощо (Fisher and Unwin, 2005). Кількість та вид класів земельного покриву, що можуть бути ідентифіковані на знімку, можуть істотно різнитися залежно від вирізняльної здатності сенсора, .
3.2.2. Контрольована класифікація¶
Напівавтоматична класифікація (також контрольована класифікація) це техніка обробки зображень, яка дозволяє визначити матеріали на знімку відповідно до їх спектральних сигнатур. Існує декілька видів алгоритмів класифікації, але головна мета це створення тематичної карти земельного покриву.
Обробка зобоажень та просторовий ГІС-аналіз потребують спеціалізованого програмного забезпечення такого як Semi-Automatic Classification Plugin для QGIS.
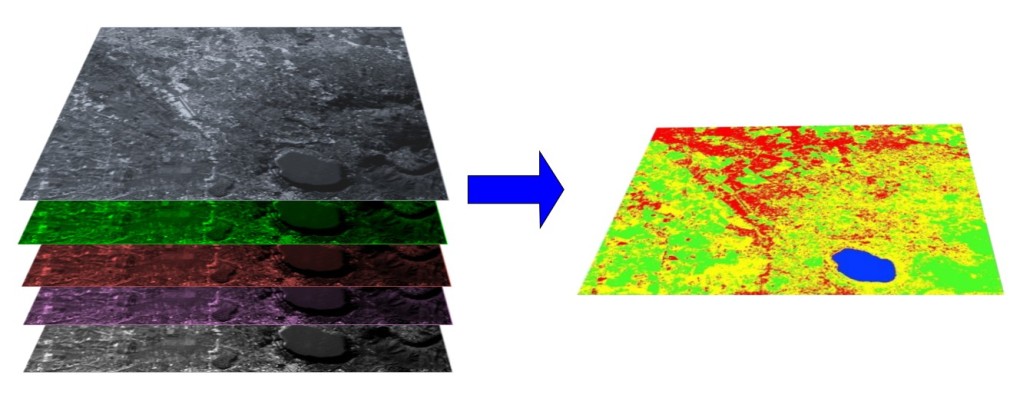
Багатоспектральне зображення оброблене для створення класифікації земельного покриву
(Знімок Landsat надано USGS)
3.2.3. Навчальні області¶
Зазвичай, контрольована класифікація потребує, щоб користувач визначив одну або декілька областей інтересу (Regions of Interest - ROI або навчальних областей) для кожного класу земельного покриву, що визначається на знімку. ROI це полігони окреслені навколо однорідних ділянок зображення, що накладаються на пікселі, які належать до одного класу земельного покриву.
3.2.3.1. Алгоритм нарощування області¶
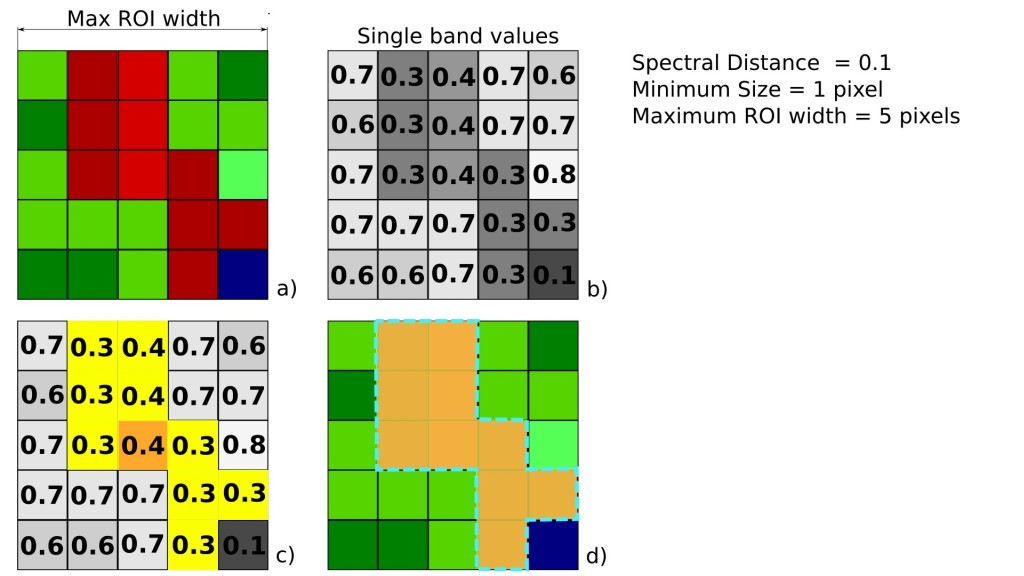
Алгоритм нарощування області дозволяє вибрати пікселі подібні до насінини з урахуванням спектральної подібності (тобто спектральної відстані) прилеглих пікселів. В SCP алгоритм нарощування області доступний для створення навчальних областей. Параметр відстань пов’язаний з подібністю значень пікселів (чим нижче значення, тим більш подібні вибрані пікселі) до насінини (вибраної клацанням на пікселі). Додатковий параметр це максимальна ширина, яка є довжиною сторони квадрата з центром в пікселі-насінині, до якого вписана навчальна область (якби всі пікселі мали одні і ті самі значення, то навчальна область також була б квадратною). Мінімальний розмір використовується в якості обмеження (поокремо для кожного каналу) при виборі пікселів, що є більш подібними до насінини, доки їх кількість не досягне принаймні мінімального розміру.
На рисунку Приклад нарощування області центральний пісель використовується в якості насінини (a) для нарощування області одного каналу (b) з параметром спектральної відстані = 0.1; подібні пікселі вибираються для створення навчальної області (c та d).
Приклад нарощування області
3.2.4. Класи та макрокласи¶
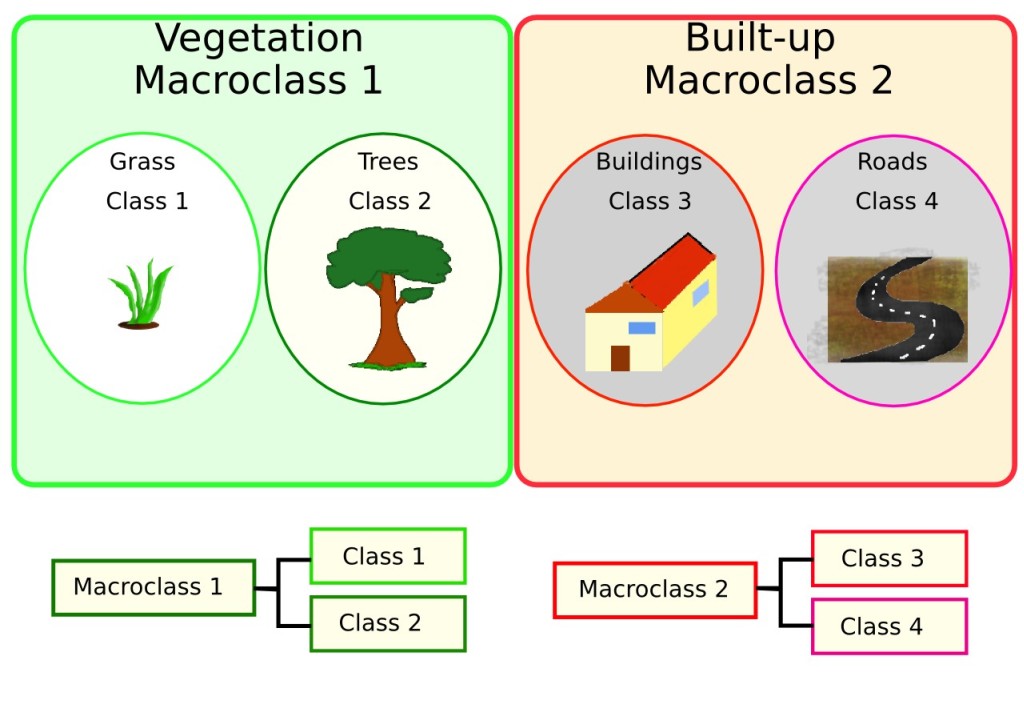
Класи земельного покриву ідентифікуються за довільними кодами ID (тобто унікальними ідентифікаторами). SCP дозволяє призначати ID макрокласу (тобто MC ID) та ID класу (тобто C ID), які є кодами-ідентифікаторами класів земельного покриву. Макроклас це група ROI, що мають різні ID класу, які є зручними за необхідності класифікувати матеріали, що характеризуються різними спектральними сигнатурами, але належать до одного класу земельного покриву. Наприклад, можна віділити траву (ID класу = 1 та ID макрокласу = 1 ) та дерева (ID класу = 2 та ID макрокласу = 1 ) як клас рослинності (ID макрокласу = 1 ). Як показано в таблиці нижче, декілька ID класів можуть бути віднесені до одного і того самого ID макрокласу, але один і той самий ID класу не може бути віднесений до багатьох ID макрокласів.
Приклад макрокласів
Назва макрокласу |
ID макрокласу |
Назва класу |
ID класу |
|---|---|---|---|
Рослинність |
1 | Трава |
1 |
Рослинність |
1 | Дерева |
2 |
Забудова |
2 | Будівлі |
3 |
Забудова |
2 | Дороги |
4 |
Відтак, як показано на рис. Приклад макрокласу, класи є підмножинами макрокласу.
Приклад макрокласу
Якщо цілі дослідження не вимагають використання макрокласу, тоді один і той самий ID макрокласу може бути призначений всім ROI (наприклад, ID макрокласу = 1) та значення макрокласу не братимуться до уваги в процесі класифікації.
3.2.5. Алгоритми класифікації¶
Спектральні сигнатури (спектральні характеристики) визначених класів земельного покриву розраховуються з урахуванням значень пікселів кожної ROI, що має той самий ID класу (або ID макрокласу). Відтак, алгоритм класифікації класифікує все зображення шляхом співставлення спектральних характеристик кожного пікселя з спектральними характеристиками визначених класів земельного покриву. SCP здатний реалізовувати наступні алгоритми класифікації.
3.2.5.1. Мінімальної відстані¶
Алгоритм мінімальної відстані розраховує Евклідову відстань \(d(x, y)\) між спектральними сигнатурами пікселів зображення та навчальними спектральними сигнатурами за наступною формулою:
де:
\(x\) = вектор спектральної сигнатури пікселя зображення;
\(y\) = вектор спектральної сигнатури навчальної області;
\(n\) = кількість каналів знімка.
Відтак, відстань розраховується для кожного пікселя на знімку з присвоєнням класу найближчої спектральної сигнатури відповідно до наступної дискримінантної функції (з змінами за Richards and Jia, 2006):
де:
\(C_k\) = клас земельного покриву \(k\);
\(y_k\) = спектральна сигнатура класу \(k\);
\(y_j\) = спектральна сигнатура класу \(j\).
Є можливість визначення порогової величини \(T_i\) з метою виключення з класифікації пікселів, що знаходяться нижче цього значення:
3.2.5.2. Максимальної вірогідності¶
Алгоритм максимальної вірогідності розраховує розподіл імовірностей для класів за Беєсовою теоремою, оцінюючи належність пікселя до класу земельного покриву. Зокрема, передбачається, що розподіл імовірностей для класів характеризується формою багатовимірних нормальних моделей (Richards & Jia, 2006). Для того, щоб застосовувати цей алгоритм, для кожної навчальної області необхідна кількість пікселів достатня для розрахунку матриці коваріації. Дискримінантна функція, наведена Richards and Jia (2006), розраховується для кожного пікселя як:
де:
\(C_k\) = клас земельного покриву \(k\);
\(x\) = вектор спектральної сигнатури пікселя зображення;
\(p(C_k)\) = імовірність, що вірний клас це \(C_k\);
\(| \Sigma_{k} |\) = визначник матриці коваріації даних в класі \(C_k\);
\(\Sigma_{k}^{-1}\) = обернена матриця коваріації;
\(y_k\) = вектор спектральної сигнатури класу \(k\).
Таким чином:
Приклад максимальної вірогідності
Також є можливість визначення порогової величини дискрмінантної функції з метою виключення з класифікації пікселів, що знаходяться нижче цього значення. З урахуванням порогової величини \(T_i\) умова класифікації набуває вигляду:
Класифікація за алгоритмом максимальної вірогідності є однією з найбільш поширених контрольованих класифікацій, однак процес класифікації може бути повільнішим порівняно з Мінімальної відстані.
3.2.5.3. Картографування спектрального кута¶
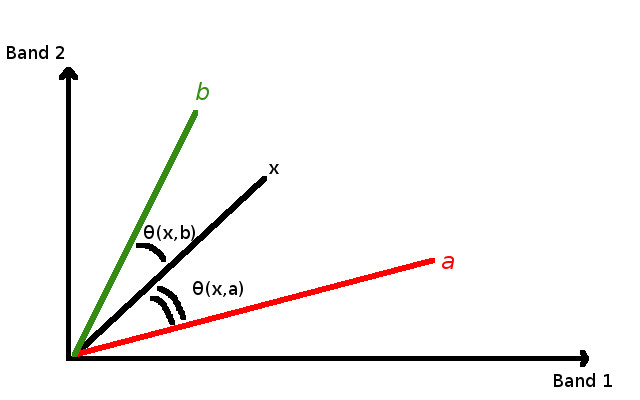
Алгоритм картографування спектрального кута розраховує спектральний кут між спектральними сигнатурами пікселів зображення та навчальними спектральними сигнатурами. Спектральний кут \(\theta\) визначається як (Kruse et al., 1993):
Де:
\(x\) = вектор спектральної сигнатури пікселя зображення;
\(y\) = вектор спектральної сигнатури навчальної області;
\(n\) = кількість каналів знімка.
Відтак піксель належить до класу, що має найменший кут, тобто:
де:
\(C_k\) = клас земельного покриву \(k\);
\(y_k\) = спектральна сигнатура класу \(k\);
\(y_j\) = спектральна сигнатура класу \(j\).
Приклад картографування спектрального кута
З метою виключення з класифікації пікселів нижче цього значення можливо призначити порогову величину \(T_i\):
Алгоритм картографування спектрального кута широко застосовується, особливо з гіперспектральними даними.
3.2.5.4. Класифікація паралелепіпеда¶
Класифікація паралелепіпеда це алгоритм, який враховує діапазон значень для кожного каналу, формуючи багатовимірний паралелепіпед, що визначає клас земельного покриву. Піксель відноситься до класу, якщо його значення знаходяться всередині паралелепіпеда. Одним з основних обмежень є те, що пікселі, сигнатури яких знаходяться в областях перекриття двох або більше паралелепіпедів, не можуть бути класифіковані (Richards and Jia, 2006).
3.2.5.5. Класифікація сигнатур земного покриву¶
У SCP доступна Класифікація сигнатур земельного покриву (див. Класифікація сигнатур земельного покриву). Ця класифікація дозволяє визначати спектральні порогові величини для кожної сигнатури входових навчальних даних (мінімальне та максимальне значення для кожного каналу). Порогові величини для кожної сигнатури входових навчальних даних визначають область, що належить до певного класу земельного покриву.
Спектральні сигнатури пікселів зображення порівнюються з спектральними навчальними сигнатурами; піксель належить до класу X, якщо його спектральна сигнатура повністю міститься в спектральній області, що визначається класом X. У випадку, якщо пікселі потрапляють до області перекриття або поза межі будь-якої спектральної області, є можливість застосувати додаткові алгоритми класифікації (наприклад, Мінімальної відстані, Максимальної вірогідності, Картографування спектрального кута) з урахуванням спектральних характеристик первинних входових сигнатур.
Рисунок нижче схематично ілюструє Класифікація сигнатур земельного покриву для простого випадку двох спектральних каналів \(x\) та \(y\). Визначені користувачем спектральні області означують три класи (\(g_a\), \(g_b\) та \(g_c\)). Точка \(p_1\) належить до класу \(g_a\), а точка \(p_2\) - до класу \(g_b\). Однак точка \(p_3\) потрапляє всередину спектральних областей обох класів \(g_b\) та \(g_c\) (області, що перекриваються); в такому випадку тока \(p_3\) залишиться некласифікованою або буде класифікована за додатковим алгоритмом класифікації. Точка \(p_4\) знаходиться поза межами будь-якої спектральної області, тому вона залишиться некласифікованою або буде класифікована за додатковим алгоритмом класифікації. За умови, що точка \(p_4\) належить до класу \(g_c\), спектральна область може бути розширена, щоб включити точку \(p_4\) .
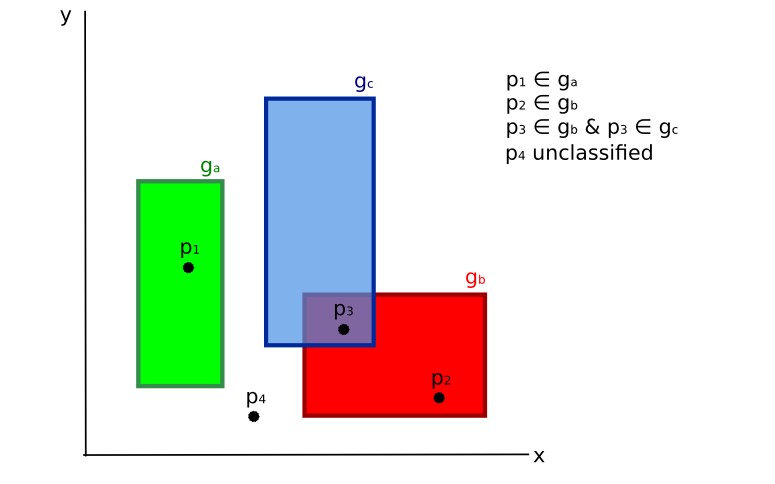
Класифікація сигнатур земельного покриву
Це є подібним до Класифікація паралелепіпеда, за виключенням того, що спектральні області визначаються користувачем і їх верхній та нижній ліміти можуть бути призначені незалежно. Спектральні області можна уявити як набір спектральних сигнатури всіх пікселів, що належать до одного класу.
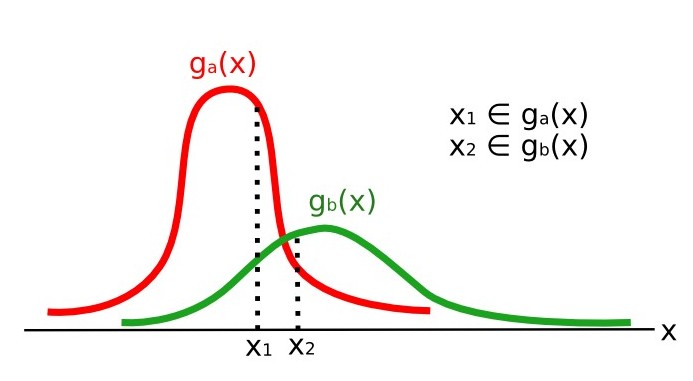
На рисунку Графік спектральних діапазонів показано спектральні діапазони трьох класів (\(g_a\), \(g_b\) та \(g_c\)); кольорові лінії всередині діапазонів (тобто напівпрозорої області) представляють спектральні сигнатури пікселів, що визначають верхній та нижній ліміти відповідних діапазонів. Піксель \(p_1\) (крапкова лінія) належить до класу \(g_b\) тому що його спектральна сигнатура знаходиться повністю всередині діапазону класу \(g_b\) (у верхньому ліміті); піксель \(p_2\) (пунктирна лінія) не класифікований, тому що його спектральна сигнатура не входить повністю до жодного діапазону; піксель \(p_3\) (крапкова лінія) належить до класу \(g_a\).
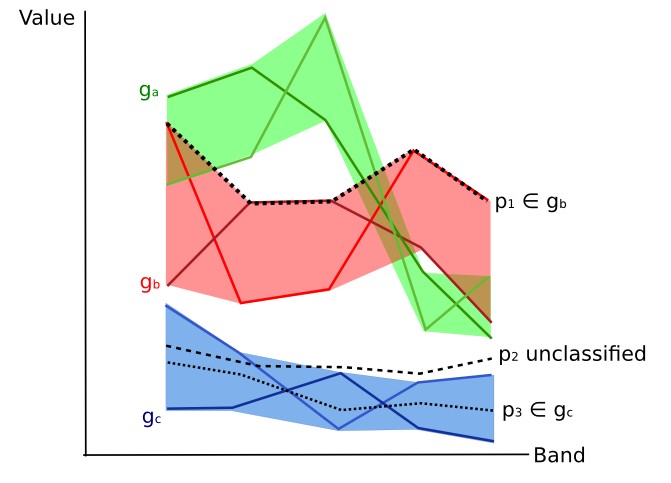
Графік спектральних діапазонів
Варто зазначити, що ці спектральні порогові величини можуть бути застосовані до будь-якої сигнатури, безвідносно її спектральних характеристик; ця функція може бут дуже корисною для відокремлення подібних спектральних сигнатур, що відрізняються лише в одному каналі, з визначенням порогових величин, які включають або виключають конкретні сигнатури. Фактично, класи відокремлюються коректно якщо їх спектральні області не перекриваються принаймні в одному каналі. Звичайно, навіть за наявності перекриття спектральних областей є можливість, що жоден піксель не потрапить до області перекриття і не буде невірно класифікований; верхній (або нижній) ліміт області не передбачає існування на зображенні будь-якої спектральної сигнатури, що має максимальне (або мінімальне) значення діапазону за всіма каналами (наприклад піксель math:p_1 рисунка Графік спектральних діапазонів не міг би існувати).
Однією з головних переваг Класифікації сигнатур земельних покривів є можливість вибору пікселів та включення їх сигнатур до спектрального діапазону; відтак, класифікація повинна бути безпосереднім представленням класу, що очікується для кожної спектральної сигнатури. Це дуже доречно для класифікації єдиного класу земельного покриву (визначеного за специфічними спектральними пороговими величинами) та залишає некласифікованою іншу частину зображення, яка не представляє інтересу для цілей класифікації.
3.2.5.6. Растр алгоритму¶
Растр алгоритму представляє “відстань” (відповідно до визначення алгоритму класифікації) пікселя зображення до певної спектральної сигнатури.
Здебільшого растр алгоритму створюється для кожної спектральної сигнатури, використаної в якості навчальних входових даних. Значення кожного пікселя це результат розрахунків алгоритму для конкретної спектральної сигнатури. Відтак, піксель належить до класу X якщо значення растра алгоритму, що відповідає класу X є найнижчим у випадку Мінімальної відстані або Картографування спектрального кута (або найвищим у випадку Максимальної вірогідності).
Залежно від класифікації може бути зроблена комбінація растрів алгоритму, щоб створити растр найменших “відстаней” (тобто пікселі мають значення растра алгоритму, що співвідноситься з класом до якого вони належать за класифікацією). Таким чином, цей растр може бути корисним для визначення пікселів, що потребують додаткового збору подібних спектральних сигнатур (див. Попередній перегляд результатів класифікації).
3.2.6. Спектральна відстань¶
Для того, щоб оцінити, чи подібні класи настільки, що це може призвести до помилок класифікації, доцільно оцінювати спектральну відстань (або відокремність) між навчальними сигнатурами та пікселями. В SCP реалізовано наступні алгоритми для оцінки подібності спектральних сигнатур.
3.2.6.1. Відстань Джефріса-Мацусіти¶
Відстань Джефріса-Мацусіти розраховує відокремність двох розподілів імовірностей. Це може бути особливо змістовно для оцінювання результатів класифікацій Максимальної вірогідності.
Відстань Джефріса-Мацусіти \(J_{xy}\) розраховується як (Richards and Jia, 2006):
де:
де:
\(x\) = вектор першої спектральної сигнатури;
\(y\) = вектор другої спектральної сигнатури;
\(\Sigma_{x}\) = матриця коваріації вибірки \(x\);
\(\Sigma_{y}\) = матриця коваріації вибірки \(y\);
Відстань Джефріса-Мацусіти асимптотна до 2, коли сигнатури абсолютно різні, і наближається до 0, коли сигнатури ідентичні.
3.2.6.2. Спектральний кут¶
Спектральний кут найбільш придатний для оцінки алгоритму Картографування спектрального кута. Спектральний кут :theta визначається як (Kruse et al., 1993):
Де:
\(x\) = вектор спектральної сигнатури пікселя зображення;
\(y\) = вектор спектральної сигнатури навчальної області;
\(n\) = кількість каналів знімка.
Спектральний кут іде від 0, коли сигнатури ідентичні, до 90, коли сигнатури абсолютно різні.
3.2.6.3. Евклідова відстань¶
Евклідова відстань особливо корисна для оцінювання результатів класифікацій Мінімальної відстані. Фактично відстань визначається як:
де:
\(x\) = вектор першої спектральної сигнатури;
\(y\) = вектор другої спектральної сигнатури;
\(n\) = кількість каналів знімка.
Евклідова відстань дорівнює 0 якщо сигнатури ідентичні і зростає із зростанням спектральної відстані між сигнатурами.
3.2.6.4. Подібність Брея-Кертіса¶
Подібність Брея-Кертіса це статистика, що використовується для оцінювання спорідненості між двома вибірками (читайте). Вона корисна загалом для оцінки подібності спектральних сигнатур, подібність Брея-Кертіса \(S(x, y)\) розраховується як:
де:
\(x\) = вектор першої спектральної сигнатури;
\(y\) = вектор другої спектральної сигнатури;
\(n\) = кількість каналів знімка.
Подібність Брея-Кертіса розраховується у відсотках і змінюється від 0, коли сигнатури абсолютно різні, до 100, коли спектральні сигнатури ідентичні.
3.2.7. Результат класифікації¶
Результатом процесу класифікації є растр (дивіться приклад класифікації Landsat на рисунку Класифікація Landsat), де значення пікселів співвідносяться з унікальними ідентифікаторами класів і кожний колір представляє клас земельного покриву.
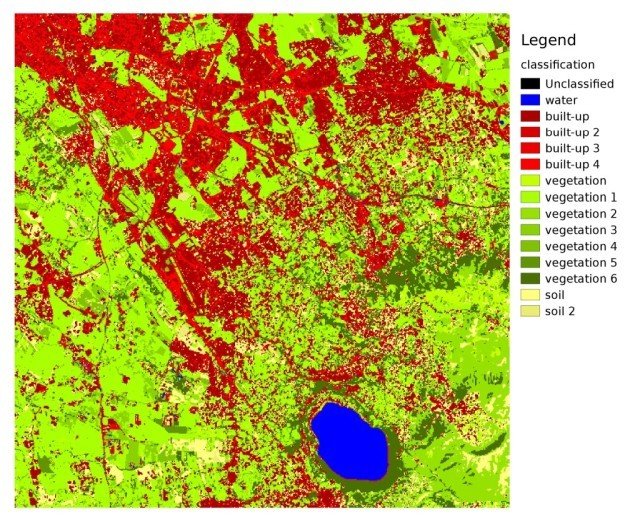
Класифікація Landsat
Дані доступні з Геологічної служби США
Певна кількість помилок може таплятись в класифікації земельного покриву (тобто пікселі віднесені до помилкового класу земельного покриву) через спектральну подібність класів або невірне визначення класу під час збору ROI.
3.2.8. Оцінка точності¶
Після процесу класифікації доцільно оцінити точність класифікації земельного покриву з метою ідентифікації та вимірювання похибок карти. Зазвичай оцінка точності виконується з розрахунком матриці похибок, яка є таблицею, що порівнює інформацію карти з контрольними даними (тобто з даними підсупутникових спостережень) для певної кількості пробних ділянок (Congalton and Green, 2009)..
Наступна таблиця схематично зображує матрицю похибок, де k це число класів, що ідентифікуються в класифікації земельного покриву, а n це загальна кількість зібраних елементів вибірки. Елементи основної діагоналі (aii) це кількість вірно ідентифікованих елементів, а інші елементи являють собою похибку класифікації.
Схема матриці похибок
Підсупутникове спостереження 1 |
Підсупутникове спостереження 2 |
… | Підсупутникове спостереження k |
Сума |
|
|---|---|---|---|---|---|
Клас 1 |
\(a_{11}\) | \(a_{12}\) | … | \(a_{1k}\) | \(a_{1+}\) |
Клас 2 |
\(a_{21}\) | \(a_{22}\) | … | \(a_{2k}\) | \(a_{2+}\) |
| … | … | … | … | … | … |
Клас k |
\(a_{k1}\) | \(a_{k2}\) | … | \(a_{kk}\) | \(a_{k+}\) |
Сума |
\(a_{+1}\) | \(a_{+2}\) | … | \(a_{+k}\) | \(n\) |
Відтак, можливо розрахувати загальну точність як відношення кількості елементів, що класифіковані вірно (сума основної діагоналі), до загальної кількості елементів вибірки n (Congalton and Green, 2009).
Для отримання подальшої інформації вільно доступна наступна документація: Landsat 7 Science Data User’s Handbook, Remote Sensing Note або Wikipedia.
3.3. Перерахунок знімка у значення відбивальності¶
В цьому розділі наведено інформацію щодо способу перерахунку у значення відбивальності, реалізованому у SCP.
3.3.1. Енергетична світність на апертурі сенсора¶
Енергетична світність це “потік енергії (переважно випромінної або надхідної) на одиницю просторового кута поверхні, що залишає одиницю площі поверхні в заданому напрямку”, “Енергетична світність вимірюється сенсором та певною мірою залежить від відбивальності” (NASA, 2011, p. 47).
Знімки, такі як Landsat або Sentinel-2, складаються з декількох каналів та файлу метаданих, який містить інформацію необхідну для перерахунку у значення відбивальності.
Знімки Landsat постачаються у попередньо змасштабованих значеннях енергетичної світності. Для знімків Landsat спектральна густина енергетичної світності на апертурі сенсора (\(L_{\lambda}\), яка вимірюється у [Вт/(м кв. * стерадіан * \(\mu m\))]), визначається за (https://landsat.usgs.gov/Landsat8_Using_Product.php):
де:
\(M_{L}\) = залежний від каналу множильний коефіцієнт перемасштабовування з метаданих Landsat (RADIANCE_MULT_BAND_x, де x це номер каналу)
\(A_{L}\) = залежний від каналу адитивний коефіцієнт перемасштабовування з метаданих Landsat (RADIANCE_ADD_BAND_x, де x це номер каналу)
\(Q_{cal}\) = дискретизовані та калібровані значення пікселів стандартного продукту (DN)
Знімки Sentinel-2 (Level-1C) постачаються вже попередньо змасштабованими у Відбивальність на поверхні атмосфери (ТОА) (ESA, 2015).
3.3.2. Відбивальність на поверхні атмосфери (ТОА)¶
Знімки у значеннях енергетичної світності можуть бути перераховані у відбивальність на поверхні атмосфери (ТОА) (комбіновану відбивальність земної поверхні та атмосфери) з метою зменшення мінливості між сценами шляхом нормування значень енергетичної освітленості сонцевим проміннямю. Відбивальність ТОА (\(\rho_{p}\)), яка є безрозмірним відношенням відбитої до загальної потужності енергії (NASA, 2011), розраховується як:
де:
\(L_{\lambda}\) = спектральна густина енергетичної світності на апертурі сенсора (енергетична світність на супутнику)
\(d\) = відстань між Землею та Сонцем в астрономічних одиницях (постачається з файлом метаданих Landsat 8, також можно скористатись файлом Еxcel, доступним з http://landsathandbook.gsfc.nasa.gov/excel_docs/d.xls)
\(ESUN_{\lambda}\) = середня екзоатмосферна енергетична освітленість сонцевим промінням
\(\theta_{s}\) = сонцевий зенітний кут в градусах, який дорівнює \(\theta_{s}\) = 90° - \(\theta_{e}\), де \(\theta_{e}\) це висота Сонця
Варто зауважити, що дані Landsat 8 постачаються з залежними від каналу коефіцієнтами перемасштабовування, які дозволяють здійснювати безпосереднє перерахування з DN до відбивальності TOA.
Знімки Sentinel-2 постачаються у вже змасштабованих значеннях відбивальності TOA, які можуть бути перераховані до відбивальності TOA за допомогою простого перерахунку з застосуванням значення квантифікації, наведеного в метаданих (див. https://sentinel.esa.int/documents/247904/349490/S2_MSI_Product_Specification.pdf).
3.3.3. Відбивальність поверхні¶
Для вимірювання відбивальності на земній поверхні повинен бути врахований вплив атмосфери (тобто збурення відбивальності, яке залежить від довжини хвилі).
Відповідно до Moran et al. (1992), відбивальність земної поверхні (\(\rho\)) це:
де:
\(L_{p}\) енергетична світність, відбита від атмосфери
\(T_{v}\) пропускальна здатність атмосфери в напрямку огляду
\(T_{z}\) пропускальна здатність атмосфери в напрямку освітлення
\(E_{down}\) низхідна енергетична освітленість розсіяним промінням
Таким чином, для розрахунку \(\rho\) необхідно провести декілька атмосферних вимірювань (з метою отримання поправок на підставі абсолютних фізичних величин). В якості альтернативи можна скористатись відносними техніками на основі знімка, які не передбачають проведення позалабораторних вимірювань під час отримання знімка. Варто зазначити, що для даних Landsat 8 доступні Surface Reflectance High Level Data Products (для більш докладної інформації читайте http://landsat.usgs.gov/CDR_LSR.php).
3.3.4. Корекція DOS1¶
Віднімання темного об’єкта (англ. Dark Object Subtraction - DOS) це група відносних методів атмосферної корекції. Chavez (1996) пояснює “основою є припущення, що деякі пікселі зображення повністю затінені і їх енергетична світність, що отримується сенсором, представлена атмосферним розсіюванням (енергетична світність, вдібита від атмосфери). Це припущення поєднується з фактом, що лише незначна кількість об’єктів на поверхні Землі є абсолютно чорними, отже припущення мінімальної відбивальності на рівні 1% краще за 0%”. Варто зауважити, що точність відносних технік корекції загалом нижча за точність абсолютних, що ґрунтуються на реальних фізичних величинах. Тим не менше, вони можуть бути корисними за відсутності доступних атмосферних вимірювань, оскільки можуть покращити оцінку відбивальності земної поверхні. Енергетична світність, відбита від атмосфери за (Sobrino, et al., 2004):
де:
\(L_{min}\) = “енергетична світність, що співвідноситься з дискретним значенням, для якого сума всіх пікселів з меншими або рівними значеннями становить 0.01% від загальної кількості пікселів всього зображення” (Sobrino, et al., 2004, p. 437), отже отримана на підставі цього дискретного значення енергетична світність (\(DN_{min}\))
\(L_{DO1\%}\) = енергетична світність темного об’єкта, що за припущенням має значення відбивальності 0.01
Зокрема для знімків Landsat:
Знімки Sentinel-2 перераховуються у значення енергетичної світності до проведення розрахунків DOS1.
Енергетична світність темного об’єкта за (Sobrino, et al., 2004):
Таким чином, енергетична світність, відбита від атмосфери, становить:
Існує декілька технік DOS (зокрема DOS1, DOS2, DOS3, DOS4), що ґрунтуються на різних припущеннях щодо \(T_{v}\), \(T_{z}\) та \(E_{down}\) . Найпростішим методом є DOS1, який виходить з наступних припущень (Moran et al., 1992):
- \(T_{v}\) = 1
- \(T_{z}\) = 1
- \(E_{down}\) = 0
Таким чином, енергетична світність, відбита від атмосфери, становить:
Результуюча відбивальність земної поверхні визначається за:
В наступній таблиці наведено значення ESUN [W /(m2 * \(\mu m\))] для сенсорів Landsat.
Значення ESUN для каналів Landsat
Канал |
Landsat 1 MSS* | Landsat 2 MSS* | Landsat 3 MSS* | Landsat 4 TM* | Landsat 5 TM* | Landsat 7 ETM+** |
|---|---|---|---|---|---|---|
| 1 | 1983 | 1983 | 1970 | |||
| 2 | 1795 | 1796 | 1842 | |||
| 3 | 1539 | 1536 | 1547 | |||
| 4 | 1823 | 1829 | 1839 | 1028 | 1031 | 1044 |
| 5 | 1559 | 1539 | 1555 | 219.8 | 220 | 225.7 |
| 6 | 1276 | 1268 | 1291 | |||
| 7 | 880.1 | 886.6 | 887.9 | 83.49 | 83.44 | 82.06 |
| 8 | 1369 |
* за Chander, Markham, & Helder (2009)
** за http://landsathandbook.gsfc.nasa.gov/data_prod/prog_sect11_3.html
Для Landsat 8, \(ESUN\) може бути розрахована як (за http://grass.osgeo.org/grass65/manuals/i.landsat.toar.html):
де значення RADIANCE_MAXIMUM та REFLECTANCE_MAXIMUM наведені в метаданих знімка.
Значення ESUN [W /(m2 * \(\mu m\))] для сенсора Sentinel-2 (наведені в метаданих знімка) містяться в наступній таблиці.
Значення ESUN для каналів Sentinel-2
Канал |
Sentinel-2 |
|---|---|
| 1 | 1913.57 |
| 2 | 1941.63 |
| 3 | 1822.61 |
| 4 | 1512.79 |
| 5 | 1425.56 |
| 6 | 1288.32 |
| 7 | 1163.19 |
| 8 | 1036.39 |
| 8A | 955.19 |
| 9 | 813.04 |
| 10 | 367.15 |
| 11 | 245.59 |
| 12 | 85.25 |
Значення ESUN [W /(m2 * \(\mu m\))] для сенсора ASTER наведено в наступній таблиці (за Finn, et al., 2012).
Значення ESUN для каналів ASTER
Канал |
ASTER |
|---|---|
| 1 | 1848 |
| 2 | 1549 |
| 3 | 1114 |
| 4 | 225.4 |
| 5 | 86.63 |
| 6 | 81.85 |
| 7 | 74.85 |
| 8 | 66.49 |
| 9 | 59.85 |
Приклад порівняння відбивальності TOA, DOS1 скоригованої відбивальності та Landsat Surface Reflectance High Level Data Products (підсупутникове спостереження) наведено на Рисунку Спектральні сигнатури пікселя забудови.
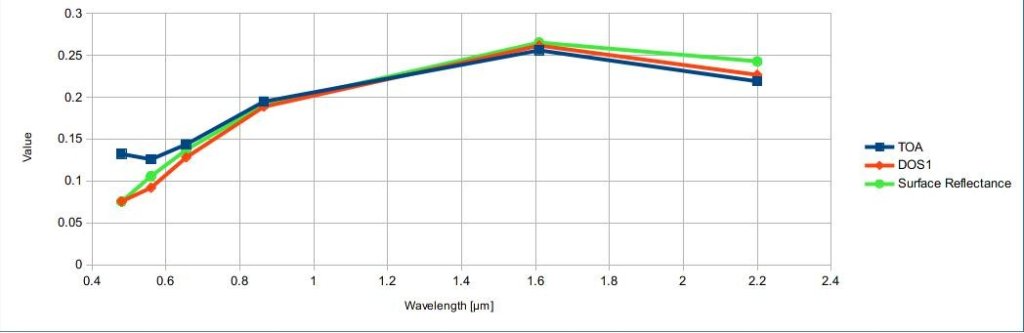
Спектральні сигнатури пікселя забудови
Порівняння відбивальності TOA, DOS1 скоригованої відбивальності та Landsat Surface Reflectance High Level Data Products
3.4. Перерахунок у температуру¶
В цьому розділі наведено основну інформацію щодо способу перерахунку у яскравісну температуру на супутнику, реалізованому у SCP та оцінки температури земної поверхні.
3.4.1. Перерахунок у яскравісну температуру на супутнику¶
Для термальних каналів перерахунок DN в яскравісну температуру на супутнику відбувається за виразом (за https://landsat.usgs.gov/Landsat8_Using_Product.php):
де:
\(K_{1}\) = залежна від каналу стала термального перерахунку (Вт/м кв. * стерадіан * \(\mu m\))
\(K_{2}\) = залежна від каналу стала термального перерахунку (Кельвін)
та \(L_{\lambda}\) спектральна густина енергетичної світності на апертурі сенсора, що вимірюється у Вт/(м кв. * стерадіан * \(\mu m\)).
Сталі \(K_{1}\) та \(K_{2}\) для сенсорів Landsat наведено в наступній таблиці.
Сталі термального перерахунку для Landsat
Стала |
Landsat 4* | Landsat 5* | Landsat 7** |
|---|---|---|---|
| \(K_{1}\) | 671.62 | 607.76 | 666.09 |
| \(K_{2}\) | 1284.30 | 1260.56 | 1282.71 |
* за Chander & Markham (2003)
** за NASA (2011)
Для Landsat 8 значення \(K_{1}\) та \(K_{2}\) наводяться в файлі метаданих знімка.
\(K_{1}\) та \(K_{2}\) розраховуються як (Jimenez-Munoz & Sobrino, 2010):
де (Mohr, Newell, & Taylor, 2015):
\(c_{1}\) = перша стала випромінювання = \(1.191 * 10^{-16} W m^{2} sr^{-1}\)
\(c_{2}\) = друга стала випромінювання = \(1.4388 * 10^{-2} m K\)
Таким чином, для каналів ASTER \(K_{1}\) та \(K_{2}\) наведено в наступній таблиці.
Сталі термального перерахунку для ASTER
Стала |
Канал 10 |
Канал 11 |
Канал 12 |
Канал 13 |
Канал 14 |
|---|---|---|---|---|---|
| \(K_{1}\) | \(3.024 * 10^{3}\) | \(2.460 * 10^{3}\) | \(1.909 * 10^{3}\) | \(8.900 * 10^{2}\) | \(6.464 * 10^{2}\) |
| \(K_{2}\) | \(1.733 * 10^{3}\) | \(1.663 * 10^{3}\) | \(1.581 * 10^{3}\) | \(1.357 * 10^{3}\) | \(1.273 * 10^{3}\) |
3.4.2. Оцінювання температури земної поверхні¶
Декілька досліджень описують оцінювання температури земної поверхні. Температура земної поверхні може бути розрахована на основі яскравісної температури на супутнику \(T_{B}\) як (Weng, et al. 2004):
де:
\(\lambda\) = довжина хвилі випроміненої енергетичної світності
\(c_{2} = h * c / s = 1.4388 * 10^{-2}\) м K
\(h\) = стала Планка = \(6.626 * 10^{-34}\) Дж с
\(s\) = стала Больцмана = \(1.38 * 10^{-23}\) Дж/K
\(c\) = швидкість світла = \(2.998 * 10^{8}\) м/с
Значення \(\lambda\) для термальних каналів супутників Landsat та ASTER можуть бути розраховані з таблиць в Супутник Landsat та Супутник ASTER.
Декілька досліджень використовували NDVI для оцінювання випромінності земної поверхні (Sobrino, et al., 2004); інші дослідження застосовували класифікацію земельного покриву для визначення випромінності земної поверхні для кожного класу (Weng, et al. 2004). Наприклад, значення випромінності (\(e\)) різних класів земельного покриву наведено в наступній таблиці (за Mallick, et al. 2012).
Значення випромінності
Тип земної поверхні |
Випромінність e |
|---|---|
Ґрунт |
0.928 |
Трава |
0.982 |
Асфальт |
0.942 |
Бетон |
0.937 |
3.5. Перелік посилань¶
- Chander, G. & Markham, B. 2003. Revised Landsat-5 TM radiometric calibration procedures and postcalibration dynamic ranges Geoscience and Remote Sensing, IEEE Transactions on, 41, 2674 - 2677
- Chavez, P. S. 1996. Image-Based Atmospheric Corrections - Revisited and Improved Photogrammetric Engineering and Remote Sensing, [Falls Church, Va.] American Society of Photogrammetry, 62, 1025-1036
- Congalton, R. and Green, K., 2009. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices. Boca Raton, FL: CRC Press
- Didan, K.; Barreto Munoz, A.; Solano, R. & Huete, A. 2015. MODIS Vegetation Index User’s Guide. Collection 6, NASA
ESA, 2015. Sentinel-2 User Handbook. Режим доступу: https://sentinel.esa.int/documents/247904/685211/Sentinel-2_User_Handbook
Finn, M.P., Reed, M.D, and Yamamoto, K.H. 2012. A Straight Forward Guide for Processing Radiance and Reflectance for EO-1 ALI, Landsat 5 TM, Landsat 7 ETM+, and ASTER. Неопублікований звіт від USGS/Center of Excellence for Geospatial Information Science, 8 p, http://cegis.usgs.gov/soil_moisture/pdf/A%20Straight%20Forward%20guide%20for%20Processing%20Radiance%20and%20Reflectance_V_24Jul12.pdf
- Fisher, P. F. and Unwin, D. J., eds. 2005. Representing GIS. Chichester, England: John Wiley & Sons
JARS, 1993. Remote Sensing Note. Japan Association on Remote Sensing. Режим доступу: http://www.jars1974.net/pdf/rsnote_e.html
- Jimenez-Munoz, J. C. & Sobrino, J. A. 2010. A Single-Channel Algorithm for Land-Surface Temperature Retrieval From ASTER Data IEEE Geoscience and Remote Sensing Letters, 7, 176-179
Johnson, B. A., Tateishi, R. and Hoan, N. T., 2012. Satellite Image Pansharpening Using a Hybrid Approach for Object-Based Image Analysis ISPRS International Journal of Geo-Information, 1, 228. Режим доступу: http://www.mdpi.com/2220-9964/1/3/228)
- Kruse, F. A., et al., 1993. The Spectral Image Processing System (SIPS) - Interactive Visualization and Analysis of Imaging spectrometer. Data Remote Sensing of Environment
- Mallick, J.; Singh, C. K.; Shashtri, S.; Rahman, A. & Mukherjee, S. 2012. Land surface emissivity retrieval based on moisture index from LANDSAT TM satellite data over heterogeneous surfaces of Delhi city International Journal of Applied Earth Observation and Geoinformation, 19, 348 - 358
- Mohr, P. J.; Newell, D. B. & Taylor, B. N. 2015. CODATA Recommended Values of the Fundamental Physical Constants: 2014 National Institute of Standards and Technology, Committee on Data for Science and Technology
- Moran, M.; Jackson, R.; Slater, P. & Teillet, P. 1992. Evaluation of simplified procedures for retrieval of land surface reflectance factors from satellite sensor output Remote Sensing of Environment, 41, 169-184
- NASA (Ed.) 2011. Landsat 7 Science Data Users Handbook Landsat Project Science Office at NASA’s Goddard Space Flight Center in Greenbelt, 186 http://landsathandbook.gsfc.nasa.gov/pdfs/Landsat7_Handbook.pdf
NASA, 2013. Landsat 7 Science Data User’s Handbook. Режим доступу: http://landsathandbook.gsfc.nasa.gov
- Ready, P. and Wintz, P., 1973. Information Extraction, SNR Improvement, and Data Compression in Multispectral Imagery. IEEE Transactions on Communications, 21, 1123-1131
- Richards, J. A. and Jia, X., 2006. Remote Sensing Digital Image Analysis: An Introduction. Berlin, Germany: Springer.
- Sobrino, J.; Jiménez-Muñoz, J. C. & Paolini, L. 2004. Land surface temperature retrieval from LANDSAT TM 5 Remote Sensing of Environment, Elsevier, 90, 434-440
- USGS, 2015. Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER) Level 1 Precision Terrain Corrected Registered At-Sensor Radiance Product (AST_L1T). AST_L1T Product User’s Guide. USGS EROS Data Center.
- Vermote, E. F.; Roger, J. C. & Ray, J. P. 2015. MODIS Surface Reflectance User’s Guide. Collection 6, NASA
- Weng, Q.; Lu, D. & Schubring, J. 2004. Estimation of land surface temperature–vegetation abundance relationship for urban heat island studies. Remote Sensing of Environment, Elsevier Science Inc., Box 882 New York NY 10159 USA, 89, 467-483